- GRA at MetaMobility Lab
- Advised by Dr. Inseung Kang
- CV
- GitHub
- Google Scholar
- vwagh[at]cs[dot]cmu[dot]edu
- pronunciation: VY-day-hee
Vaidehi Wagh
Master of Science in Robotics, Carnegie Mellon University
I am a graduate researcher at Carnegie Mellon University, where my research focuses on building multimodal interfaces for human-exoskeleton interaction, building end-to-end, latency, resource and safety aware systems that can adapt to users through life.
I received my B.Tech. in Mechanical Engineering from the College of Engineering, Pune, and was a research intern at the University of British Columbia (Neuroplasticity, Imagery and Motor Behaviour Laboratory), where I built large-scale vision pipelines for upper-limb kinematics after stroke.
I am seeking full-time research positions in machine learning, artificial intelligence, and robotics research roles with availability from June 2026.
Research
Exoskeleton control personalization
MetaMobility Lab, Carnegie Mellon University
Multimodal, user-in-the-loop hip assistance: egocentric video and transcribed speech inform vision-language reasoning and structured controller updates for wearable deployment.
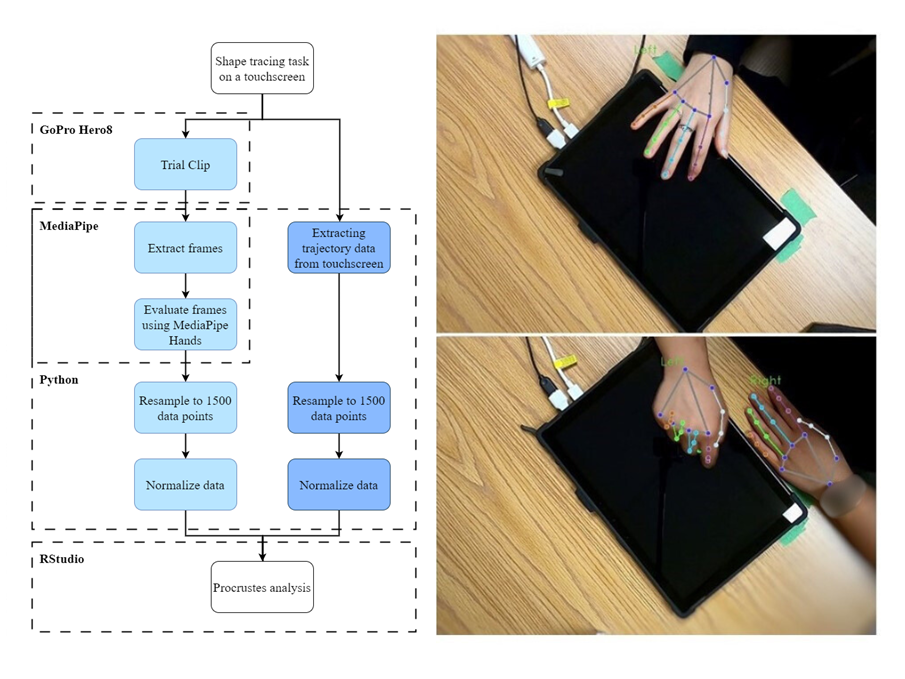
Clinical kinematic analysis with monocular pose estimation
Neuroplasticity, Imagery and Motor Behaviour Lab, University of British Columbia
High-throughput analysis of post-stroke upper-limb reaching using commodity vision, with validation against laboratory motion capture and peer-reviewed clinical reporting.
Publications
{kind=link}
Projects
Vision-language interface for human–robot interaction
Course project, Talking to Robots (Fall 2025)
Finetuned compact VLMs for speech- and vision-conditioned planning relevant to personalized assistive control.
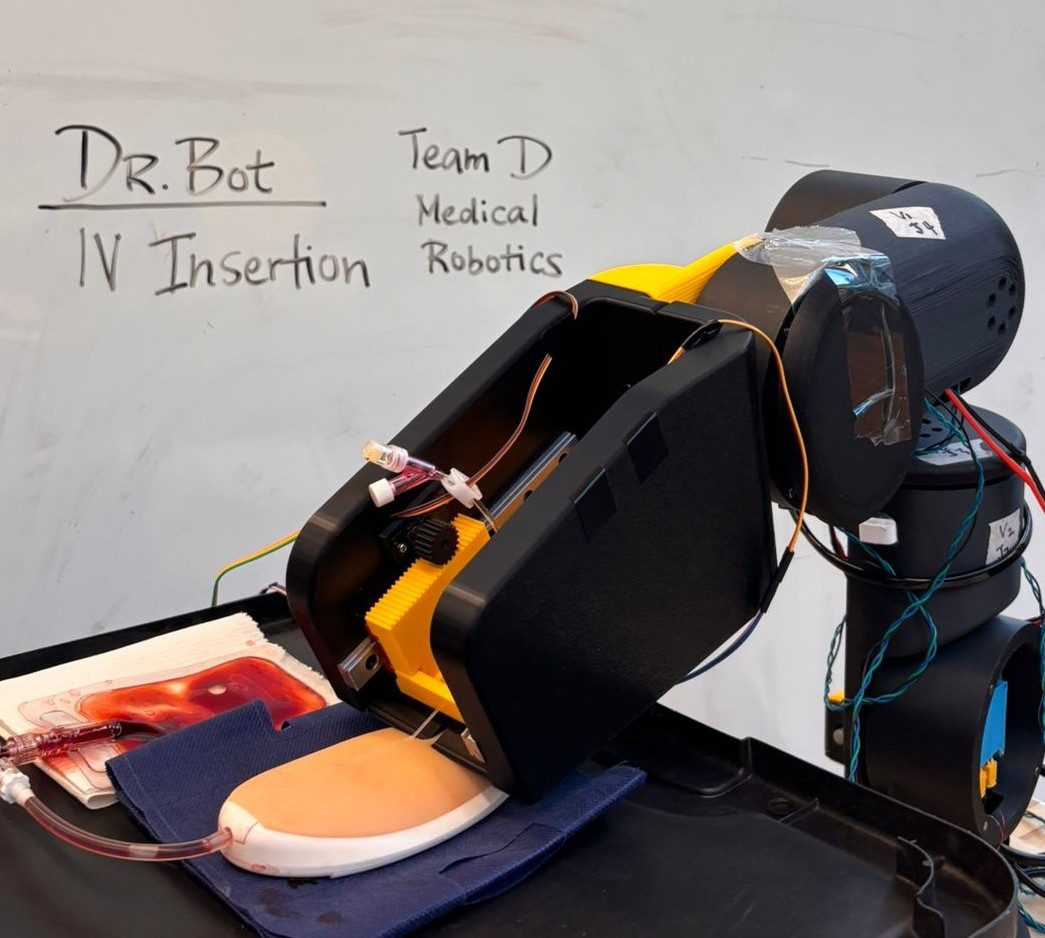
Automated intravenous insertion prototype
Course project, Medical Robotics (Fall 2025)
Custom actuation, vision-based vein localization, and closed-loop integration for a bench-scale insertion workflow.
Generative adversarial imitation learning
Course project, Introduction to Robot Learning (Spring 2025)
Locomotion imitation from motion-capture experts using adversarial reward inference and policy optimization.
LQR-based humanoid balancing
Course project, Optimal Control and Reinforcement Learning (Spring 2025)
Linear-quadratic regulation for balance of a simulated humanoid on a moving support surface.
Teaching
11977A: Multimodal Machine Learning: S26
Prof. Yonatan Bisk, Prof. David Mortensen, Prof. Ralf Brown
16385: Computer Vision: F25
Prof. David Held
PLUS Tutoring: S25 - S26
Lead Tutor